CH 0716052-001 2012 kostenlose druckbare Vorlage
Details anzeigen
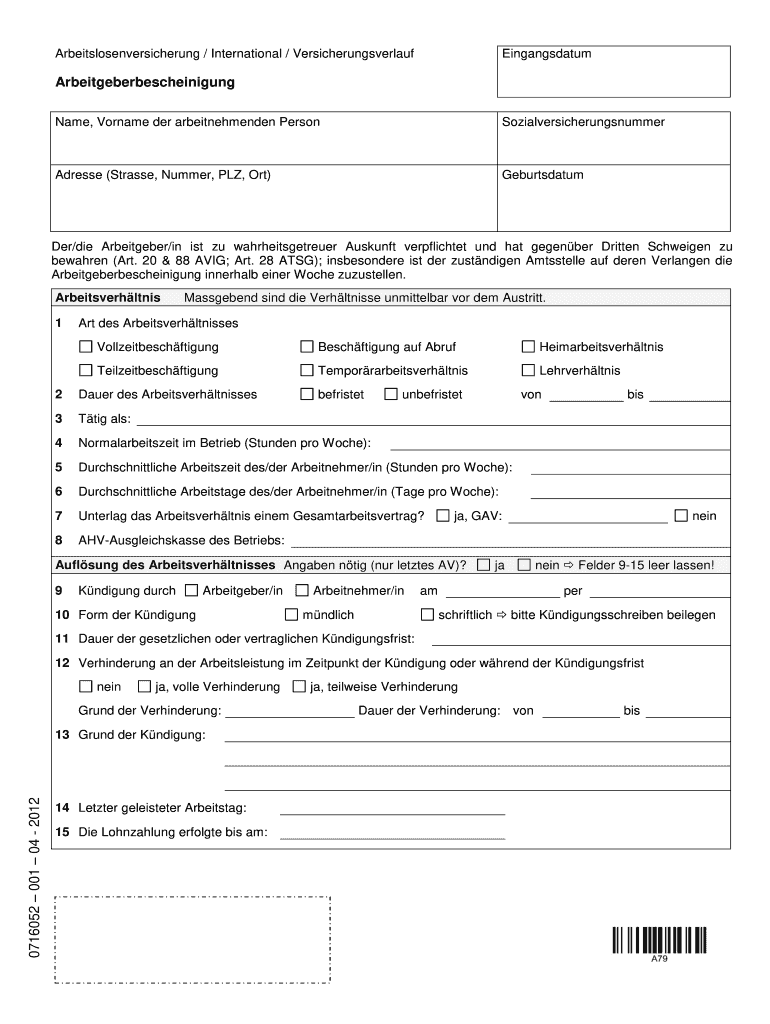
Arbeitslosenversicherung / International / Versicherungsverlauf Eingangsdatum Arbeitgeberbescheinigung Name, Surname her arbeitnehmenden Person Sozialversicherungsnummer Address (Stress, Number, PLY,
Wir sind mit keiner Marke oder Entität auf diesem Formular verbunden
Abrufen, Erstellen, Anfertigen und Unterschreiben CH 0716052-001
Bearbeiten CH 0716052-001 online Formular
Geben Sie Text ein, füllen Sie die Felder vollständig aus, fügen Sie Bilder ein, markieren Sie die Daten für Diskretion, fügen Sie Kommentare und vieles mehr ein.
Fügen Sie Ihre rechtlich bindende Signatur hinzu
Zeichnen oder tippen Sie Ihre Unterschrift, laden Sie ein Unterschriftsbild hoch oder nehmen Sie es mit Ihrer Digitalkamera auf.
Teilen Sie Ihr Formular sofort
E-Mail, Fax oder teilen Sie Ihre CH 0716052-001 -Formular via URL angeben. Sie können Formulare auch herunterladen, drucken oder in Ihren bevorzugten Cloudspeicherdienst exportieren.
Wie man CH 0716052-001 online bearbeitet



Befolgen Sie die untenstehenden Anweisungen um den professionellen PDF-Editor zu nutzen :
1
Registrieren Sie sich für das Konto. Beginnen Sie mit einem Klick auf Kostenlos testen und erstellen Sie ein Profil, falls Sie neu hier sind.
2
Fügen Sie ein Dokument hinzu. Wählen Sie Neues hinzufügen auf Ihrem Dashboard und importieren Sie eine Datei ins System, indem Sie sie von Ihrem Gerät hochladen oder aus der Cloud, dem Web oder einer internen E-Mail importieren. Anschließend klicken Sie auf Bearbeiten starten.
3
Bearbeiten Sie CH 0716052-001. Ordnen Sie Seiten neu an und drehen Sie sie, fügen Sie Text hinzu oder ändern Sie ihn, fügen Sie neue Objekte ein und nutzen Sie weitere nützliche Werkzeuge. Klicken Sie auf Fertig, um Änderungen zu übernehmen und zurück zu Ihrem Dashboard zu wechseln. Im Dokumente-Tab können Sie Funktionen wie Zusammenführen, Teilen, Sperren oder Entsperren verwenden.
4
Holen Sie sich Ihre Datei. Wählen Sie den Dateinamen in Ihrer Dokumentenliste und entscheiden Sie sich für eine Exportoption. Laden Sie sie als PDF herunter, speichern Sie sie in einem anderen Format, senden Sie sie per E-Mail, teilen Sie sie, drucken Sie sie aus oder öffnen Sie sie mit einer anderen Anwendung. Überprüfen Sie, ob alle Änderungen gespeichert wurden, bevor Sie weitermachen.
Wir schätzen Ihre Wahl und bedanken uns für Ihr Vertrauen! Wir freuen uns, Sie in Zukunft weiterhin unterstützen zu können und hoffen, dass Sie mit unserem Service zufrieden sind.
Kompromisslose Sicherheit für Ihre PDF-Bearbeitungs- und eSignature-Anforderungen
Ihre privaten Informationen sind bei pdfFiller sicher. Wir verwenden durchgehende Verschlüsselung, sicheren Cloud-Speicher und erweiterte Zugriffskontrollen, um Ihre Dokumente zu schützen und die Einhaltung von Vorschriften zu gewährleisten.
CH 0716052-001 Formular-Versionen
Version
Beliebtheit des Formulars
Ausfüllbar und ausdruckbar
Ausfüllen CH 0716052-001
So füllen Sie CH 0716052-001 aus
01
Öffnen Sie das Formular CH 0716052-001.
02
Geben Sie Ihre persönlichen Informationen in die entsprechenden Felder ein.
03
Füllen Sie die finanziellen Details gemäß den Anforderungen aus.
04
Stellen Sie sicher, dass alle erforderlichen Dokumente beigefügt sind.
05
Überprüfen Sie das Formular auf Richtigkeit und Vollständigkeit.
06
Unterschreiben Sie das Formular.
07
Reichen Sie das ausgefüllte Formular bei der zuständigen Stelle ein.
Wer braucht CH 0716052-001?
01
Personen, die eine Steuererklärung in der Schweiz einreichen müssen.
02
Selbstständige sowie Freiberufler, die ihre Einkünfte melden.
03
Unternehmen, die steuerliche Informationen über ihre Einkünfte und Ausgaben bereitstellen.
04
Personen, die Anspruch auf steuerliche Abzüge oder Vergünstigungen haben.
Anleitung und Hilfe für CH 0716052-001
Hello today I'm going to use a two revolute joint robot to explain product of exponential formula of forward air kinematics and this formula is used to determine the configuration of an N factor giving the configuration of each individual adjacent link and in order for us to do that we first have to fix find a fixed frame to determine the first configuration of the N factor then find a configuration of the individual adjacent links we and this M happens to be actually the OMO genius transformation which tells us the location of our n factor so in this case since our this is our n factor, and we want to find a configuration of this n factor with respect to a reference frame or our C frame we are going to what make our C frame a fixed frame and determine the configuration of our n factor and when we fix it we'll be able to find the location of our n factor and in this case M as we know this is going to be a positive z axis positive y-axis positive X's M is going to be 1 0 0 0 0 1 0 L 1 0 0 1 L naught 0 0 0 1 because L naught is in a z axis ll L 1 is in our y-axis, and we don't have any then in our X assets, so this defines our location of n factor, so now we have to find a configuration with respect to the fixed frames that we will define, so we know the screw formula we know the linear velocity from a unit linear velocity formula when our joint is a revolute joint meaning that the robot is going to rotate along in this case the positive z axis, so we are not going to have a pitch, so we can use this formula for our velocity, so we know our Q 2 to be AB any arbitrary point our longer axis of rotation which our axis of rotation happens to be Omega so let's go ahead and find our parameters that will define the configuration of the link and eventually help us determine the configuration of our end factor so to make a quick table here ok 1 & 2, so I Omega 1 when B is fixed what is going to Omega 1 is going to be 0 0 1 since the axis of rotation lies in the X and the Z a positive Z direction and Q 1 is going to be an arbitrary point on there, so I'm going to take it to be 0 0 0 that will give us 0 0 0 for ah V 1 now for I Omega 2 when we fix as the C frame we are going to get 0 0 1 also and a Q 1 I want to go with 0 0 I'm sorry L 1 0 and that will give us L 1 0 0 and this gives us the configuration of n factor thank you for watching
Ausfüllen
form
: Testen Sie risikofrei
Leute fragen auch nach
What is a portable document U1 or certificate E301?
What is the PD U1 (E 301) form? The PD U1 form (formerly E 301 form), or "Certificate of periods to be taken into account for unemployment benefits", is a confirmation of your work abroad during which your employer paid unemployment insurance contributions on your behalf.
What is the U1 E301?
E301/U1 – confirms the period of insurance to be taken into account for granting the unemployment benefits.
How do I get my U1 form in Switzerland?
If you were previously entitled to unemployment benefits in Switzerland, you must request the PD U1 from the payment office which was responsible for your benefits during your unemployment. Otherwise, you are free to choose.
Where can I get a U2 form?
You can get a completed Form U2 from your local Intreo Centre or Social Welfare Branch Office.
How do I get PD U1?
How do I get a PD U1 (E 301) form? Before returning to your home country or after your employment has ended, you must apply for a PD U1 (E 301) form from the relevant branch of the foreign employment office. The application must be accompanied by copies of documents (which may vary from one EU country to another).
What is pdu1?
What is a PD U1 form? The 'PD U1 Form' lists the periods in which you worked as an insured employee in the EU/EEA or Switzerland. This is important as your employment history in these countries counts towards your general employment history and will affect your chances of receiving an unemployment benefit.
FAQs über pdfFiller
Unten finden Sie eine Liste der häufigsten Kundenfragen. Wenn Sie keine Antwort auf Ihre Frage finden, zögern Sie nicht, uns zu kontaktieren.
Wo finde ich CH 0716052-001?
Die Premium-Version von pdfFiller bietet Ihnen Zugriff auf eine riesige Bibliothek von ausfüllbaren Formularen (über 25 Millionen ausfüllbare Vorlagen). Sie können sie alle herunterladen, ausfüllen, drucken und unterschreiben. Staatsspezifische CH 0716052-001- und andere Formulare sind in der Bibliothek leicht zu finden. Finden Sie die Vorlage, die Sie benötigen, und verwenden Sie erweiterte Bearbeitungswerkzeuge, um sie anzupassen.
Wie kann ich CH 0716052-001 auf einem Smartphone bearbeiten?
Die beste Möglichkeit, Dokumente auf einem Mobilgerät zu bearbeiten, besteht darin, die Apps von pdfFiller für iOS und Android zu verwenden. Diese können Sie im Apple Store und bei Google Play herunterladen. Weitere Informationen zu den Apps finden Sie hier. Um mit der Bearbeitung von CH 0716052-001 zu beginnen, installieren und melden Sie sich bei der App an.
Wie bearbeite ich CH 0716052-001 auf einem iOS-Gerät?
Verwenden Sie die pdfFiller-App für iOS, um CH 0716052-001 auf Ihrem Telefon zu erstellen, zu bearbeiten und zu teilen. Sie lässt sich im Apple Store im Handumdrehen installieren. Sie können eine kostenlose Testversion nutzen und ein Abonnement auswählen, das zu Ihnen passt.
Was ist CH 0716052-001?
CH 0716052-001 ist ein Dokument, das für die steuerliche Meldung von bestimmten Informationen in der Schweiz erforderlich ist.
Wer muss CH 0716052-001 einreichen?
Personen und Unternehmen, die steuerpflichtige Einkünfte in der Schweiz erzielen, müssen CH 0716052-001 einreichen.
Wie fülle ich CH 0716052-001 aus?
CH 0716052-001 wird in der Regel elektronisch ausgefüllt. Es sind spezifische Anleitungen auf den entsprechenden Behördenwebseiten verfügbar.
Was ist der Zweck von CH 0716052-001?
Der Zweck von CH 0716052-001 besteht darin, die steuerlichen Angaben von Personen und Unternehmen in der Schweiz zu erfassen und zu überprüfen.
Welche Informationen müssen auf CH 0716052-001 gemeldet werden?
Auf CH 0716052-001 müssen Angaben zu Einkünften, Abzügen, Vermögen und anderen relevanten finanziellen Informationen gemeldet werden.
Füllen Sie Ihr aus CH 0716052-001 online mit pdfFiller!
pdfFiller ist eine End-to-End-Lösung zum Verwalten, Erstellen und Bearbeiten von Dokumenten und Formularen in der Cloud. Sparen Sie Zeit und Aufwand, indem Sie Ihre Steuerformulare online vorbereiten.
CH 0716052-001 ist nicht das Formular, das Sie suchen?Suchen Sie hier nach einem anderen Formular.
Relevante Schlüsselwörter
Ähnliche Formulare





Wenn Sie der Meinung sind, dass diese Seite entfernt werden sollte, folgen Sie bitte unserem DMCA-Verfahren zur Entfernung von Inhalten
hier
.
Dieses Formular kann Felder für Zahlungsinformationen enthalten. Daten, die in diese Felder eingegeben werden, fallen nicht unter die PCI DSS-Compliance.
